Tianxing Chen
💻 Co-Founder & CTO of Xspark AI · 🎓 PhD Student at MMLab@HKU · 🎙️ Founder of Lumina EAI Community
Hi! I am Tianxing Chen (Chinese name: 陈天行), Co-Founder and CTO of Xspark AI, founder of Lumina Embodied AI Community, and also a first-year Ph.D. student at MMLab@HKU, The University of Hong Kong (since Oct. 2025), supervised by Prof. Ping Luo. My research focuses on Embodied AI Infra, including Robotic Foundation Model, Data Generator and Evaluation.
Detailed Profile (详细个人介绍)
Hi! I am Tianxing Chen (Chinese name: 陈天行), Co-Founder and CTO of Xspark AI, founder of Lumina Embodied AI Community, and also a first-year Ph.D. student at MMLab@HKU, The University of Hong Kong (since Oct. 2025), supervised by Prof. Ping Luo. My research focuses on Embodied AI Infra, including Robotic Foundation Model, Data Generator and Evaluation.
I have published multiple papers at top venues such as CVPR, RSS, ICLR, ICRA and ACL. My works received Best Paper Award at the ICRA 2026 ViTac Workshop and ECCV 2024 MAAS Workshop, Champion at NeurIPS 2025 MARS Challenge (Control Track), third-runnerup at IROS 2025 AgiBot World Challenge (Manipulation Track), Best Poster Award at IROS 2025 RoMaDo, RoDGE, AIR4S Workshop and ChinaSI 2025, and a CVPR Highlight recognition. I organized Embodied-AI-Guide project, and received over 10k Github stars, which is the most popular EAI tutorial. Beyond research, I have been honored with the CCF Elite Collegiate Award (99 nationwide) and the "Excellent Star of SZU", the highest undergraduate honor at Shenzhen University (ranked 2/30,000). I also won a silver medal in the ACM-ICPC regional competition and was national runner-up in the RAICOM robotics developer competition.
I have served as an organizer of the ECCV 2026 Safe World Model Workshop,SIGGRAPH ASIA 2025 TriFusion Workshop, CVPR 2025 MEIS Workshop, the CVPR 2025 RoboTwin Dual-Arm Collaboration Challenge, and the Greater Bay Area Embodied AI Workshop. I am also a student committee member of the Autonomous Robotic Technology Seminar (ARTS). In addition, I share my thoughts on research and technology as a blogger and vlogger, with over 20k followers on Rednote 🎒@TianxingChen (陈天行).
Hi!我是陈天行 (English name: Tianxing Chen),Xspark AI 联合创始人兼CTO,Lumina具身智能社区的创始人, 同时也是香港大学MMLab@HKU的一年级博士生(始于2025年9月), 师从罗平教授。 我的研究方向是具身智能基础架构,包括机器人通用基础模型、数据合成器与评测。
我在CVPR、RSS、ICLR、ICRA、ACL等学术顶会发表多篇论文。在ICRA 2026 ViTac Workshop和ECCV 2024 MAAS Workshop上获得最佳论文奖, 获得NeurIPS 2025 MARS操作赛冠军,IROS 2025 AgiBot World操作赛季军,在IROS 2025 RoMaDo、RoDGE、AIR4S Workshop 与ChinaSI 2025上获得最佳海报奖,获得CVPR Highlight等。我组织了Embodied-AI-Guide项目,获得了超过一万Github Stars, 是最流行的具身智能教程。我曾经获得CCF优秀大学生(全国年度99人)、荔园卓越之星(深圳大学本科生最高荣誉)等荣誉。 竞赛上获得ACM-ICPC国际大学生程序设计竞赛银牌,在RAICOM机器人开发者大赛中获得赛道全国亚军等。
我也曾作为组织者举办ECCV 2026 Safe World Model Workshop、SIGGRAPH ASIA 2025 TriFusion Workshop、CVPR 2025 MEIS Workshop、 CVPR 2025 RoboTwin双臂协作竞赛、大湾区具身智能研讨会等。担任ARTS自主机器人技术研讨会的学生委员会成员。 同时,我还在小红书拥有超20k粉丝🎒@TianxingChen (陈天行)。
我们正在寻找认同 Xspark AI 愿景的建设者与研究者。无论你希望与我们开展科研合作,还是加入团队 (我们正在积极招募硬件、仿真、操作策略方向的技术人才),都欢迎与我们联系 [邮箱]。
 WeChat
WeChat
News
- 05/2026 🎉 Selected as Gold Reviewer at ICML 2026 !
- 05/2026 🏆 UniVTAC received Best Paper Award at ICRA 2026 ViTac Workshop !
- 04/2026 🎉 RoboTwin 2.0 is accepted to ICML 2026 !
- 03/2026 🎉 We released ManiTwin, which is a large-scale annotated assets dataset !
- 03/2026 🎉 We released RMBench, which is a memory-dependent manipulation benchmark !
- 01/2026 🎉 Three papers are accepted to ICRA 2026 !
- 01/2026 🎉 Four papers are accepted to ICLR 2026 !
- 12/2025 🎉 Embodied-AI-Guide received over 10k Github stars and became the most popular CN EAI tutorial !
- 11/2025 🎉 We received 复杂场景决策卓越奖 at 深圳市灵巧手大赛 !
- 11/2025 🎉 We won the Champion 🏆 of NeurIPS 2025 MARS Challenge Manipulation Track !
- 11/2025 🎉 Selected as 2025 D-Robotics Developer Star !
- 11/2025 🎉 Received "深圳大学名校深造奖学金" (ranking 1st), CNY 100,000 !
- 10/2025 🎉 RoboTwin 2.0 received Best Poster Award at IROS 2025 RoDGE Workshop !
- 10/2025 🎉 AutoBio received Best Poster Award at IROS 2025 AIR4S Workshop !
- 10/2025 🎉 Received the Third Runner-up Award in the Manipulation Track at the AGiBot World Challenge @ IROS 2025 !
- 10/2025 🎉 LeHome received Best Poster Award at IROS 2025 RoMaDo Workshop !
- 09/2025 🎉 RoboTwin 2.0 has been selected as Best Paper Finalist at IROS 2025 RoboGen Workshop !
- 08/2025 📢 I am organizing the TriFusion Workshop @ SIGGRAPH ASIA 2025, which is now calling for papers !
- 07/2025 🎉 Interviewed by MIT Technical Review China (《麻省理工科技评论》中国), "Next Gen" Series [Report] !
- 07/2025 🎉 RoboTwin 2.0 received Outstanding Poster at ChinaSI 2025 (Ranking 1st) 🏆 !
- 07/2025 🎉 Graduated with a bachelor's degree from Shenzhen University !
- 07/2025 📄 We released RoboTwin Dual-Arm Collaboration Challenge Technical Report @ CVPR 2025 MEIS Workshop [arXiv] !
- 05/2025 🎉 My Rednote (小红书) has reached 10k followers !
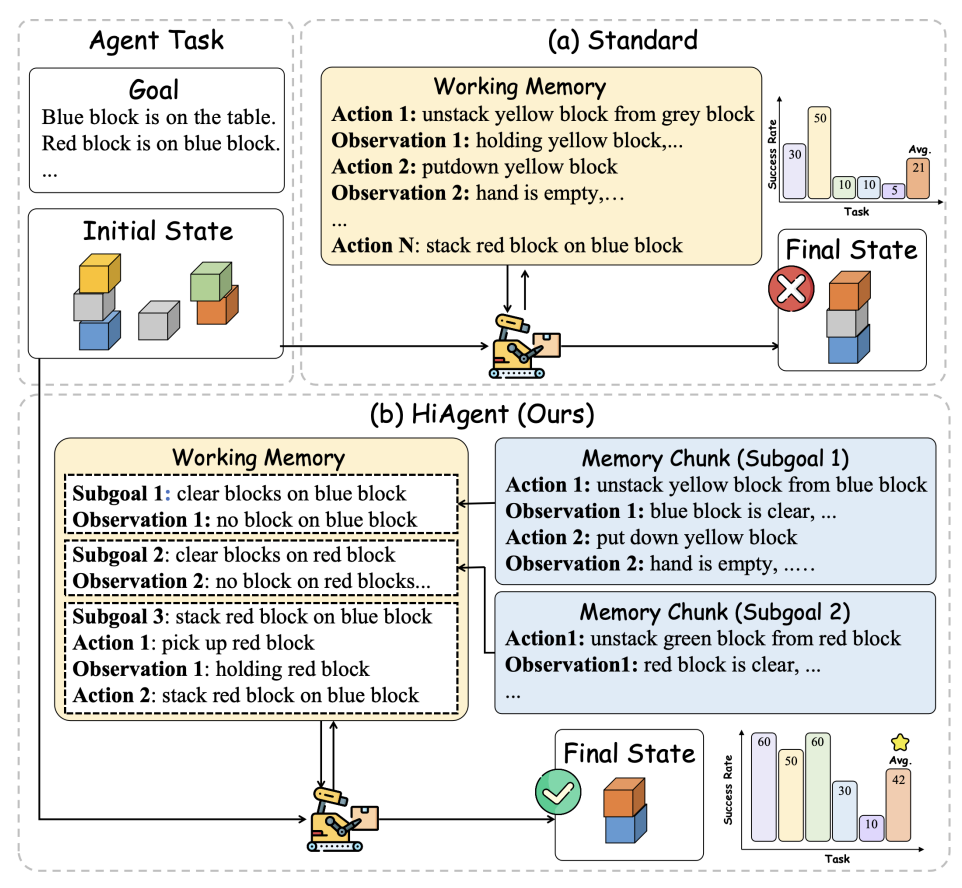
- 05/2025 🎉 Text2World and HiAgent are accepted to ACL 2025 !
- 04/2025 🎉 My graduation thesis is graded A+ and selected as one of the university's top 100 outstanding theses. [Acknowledgements]
- 04/2025 🎉 CordViP is accepted to RSS 2025 !
- 04/2025 🎉 RoboTwin is selected as Highlight (13.5%) !
- 02/2025 🎉 3 Papers (G3Flow, RoboTwin and DexHandDiff) are accepted to CVPR 2025 !
- 12/2024 Serving as an Organizer for the 2nd MEIS Workshop at CVPR 2025.
- 09/2024 🎉 RoboTwin (Early Version) received the Best Paper Award at the ECCV 2024 MAAS Workshop !
- 04/2024 🎉 One paper is accepted to ICARM 2024, which is my first paper 🌹 !
- 04/2024 🎉 We won the National Gold Medal 🏅, Provincial Runner-up 🏆 of China Collegiate Computing Contest !
- 01/2024 🧑💻 Joined Shanghai AI Laboratory as Intern Researcher. Started doing research on Robotics !
- 10/2023 🎉 I received the highest honor for undergraduate students at Shenzhen University, "Excellent Star of SZU", ranked 2nd among the 30,000 undergraduates in the school (top 0.0067%) ! [Report]
- 10/2023 🎉 I received CCF Elite Collegiate Award, which is awarded by China Computer Federation, to the top 99 students nationwide in 2023 ! [Report]
- 08/2023 🎉 Our team won the National Runner-up 🏆 of RAICOM !
- 06/2023 🧑💻 I started to lead the SZU Algorithm Training Team !
- 01/2023 🎉 Our team (SZU_Tencent) won Silver Medal 🥈 in 46th ICPC Asia, Hong Kong !
Education
-
Oct. 2025
—
Jun. 2029
(expected) AI & Data Science Division (AI), School of Computing and Data Science (CDS)
AI & Data Science Division (AI), School of Computing and Data Science (CDS) -
Sep. 2021
—
Jul. 2025 B.Eng. in Computer Science and Technology (Outstanding Class)
B.Eng. in Computer Science and Technology (Outstanding Class)
Entrepreneurship
-
Mar. 2026
—
Present
-
May. 2025
—
Present Founder @ Lumina Embodied AI CommunityWebpage: lumina-embodied.aiOne of the most popular Embodied AI Communities over China.
Founder @ Lumina Embodied AI CommunityWebpage: lumina-embodied.aiOne of the most popular Embodied AI Communities over China.
Research Experience
-
2025
—
2026 Edge Team, Seed, ByteDanceResearch Intern — VLA Training, Simulation Data Scaling and Evaluation
Edge Team, Seed, ByteDanceResearch Intern — VLA Training, Simulation Data Scaling and Evaluation -
2025
—
2025 ScaleLab, Shanghai Jiao Tong UniversityResearch Intern — Simulation Data Scaling and Evaluation
ScaleLab, Shanghai Jiao Tong UniversityResearch Intern — Simulation Data Scaling and Evaluation -
2024
—
2025 OpenGVLab, Shanghai AI LaboratoryResearch Intern — Manipulation Policy and Simulation Evaluation
OpenGVLab, Shanghai AI LaboratoryResearch Intern — Manipulation Policy and Simulation Evaluation
Publications [My Google Scholar]
-

-
ManiTwin: Scaling Data-Generation-Ready Digital Object Dataset to 100KUnder Review
-
LeHome: A Simulation Environment for Deformable Object Manipulation in Household ScenariosIEEE ICRA 2026🏆 IROS 2025 RoMaDo Workshop Best Poster Award
-
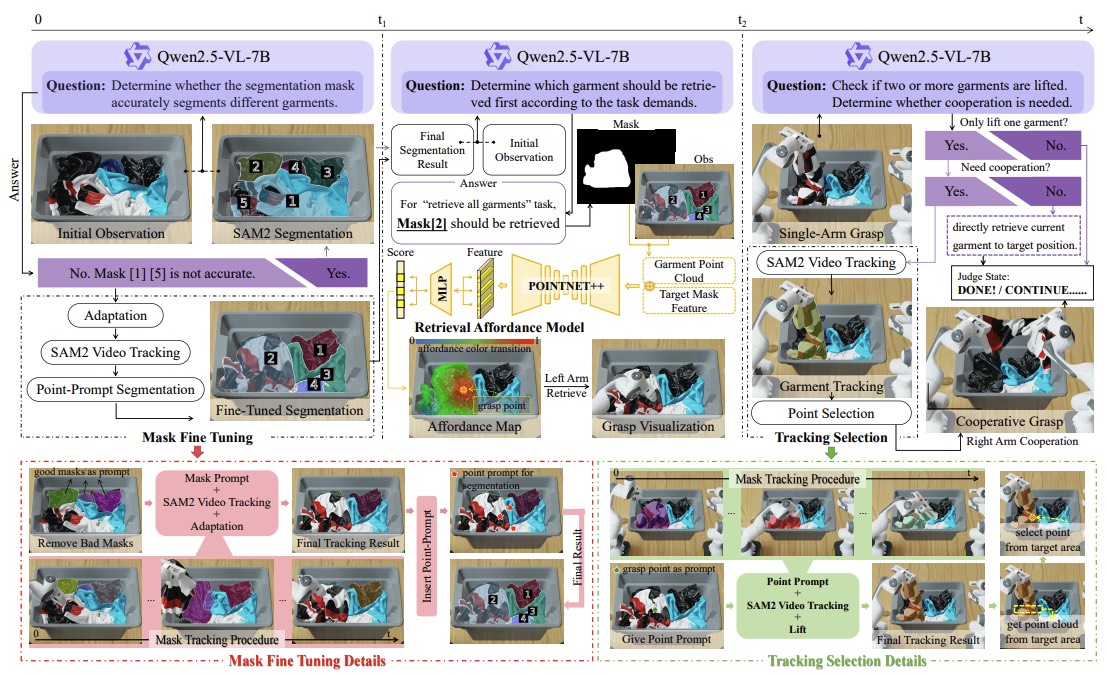 GarmentPile++: Affordance-Driven Cluttered Garments Retrieval with Vision-Language ReasoningIEEE ICRA 2026
GarmentPile++: Affordance-Driven Cluttered Garments Retrieval with Vision-Language ReasoningIEEE ICRA 2026 -
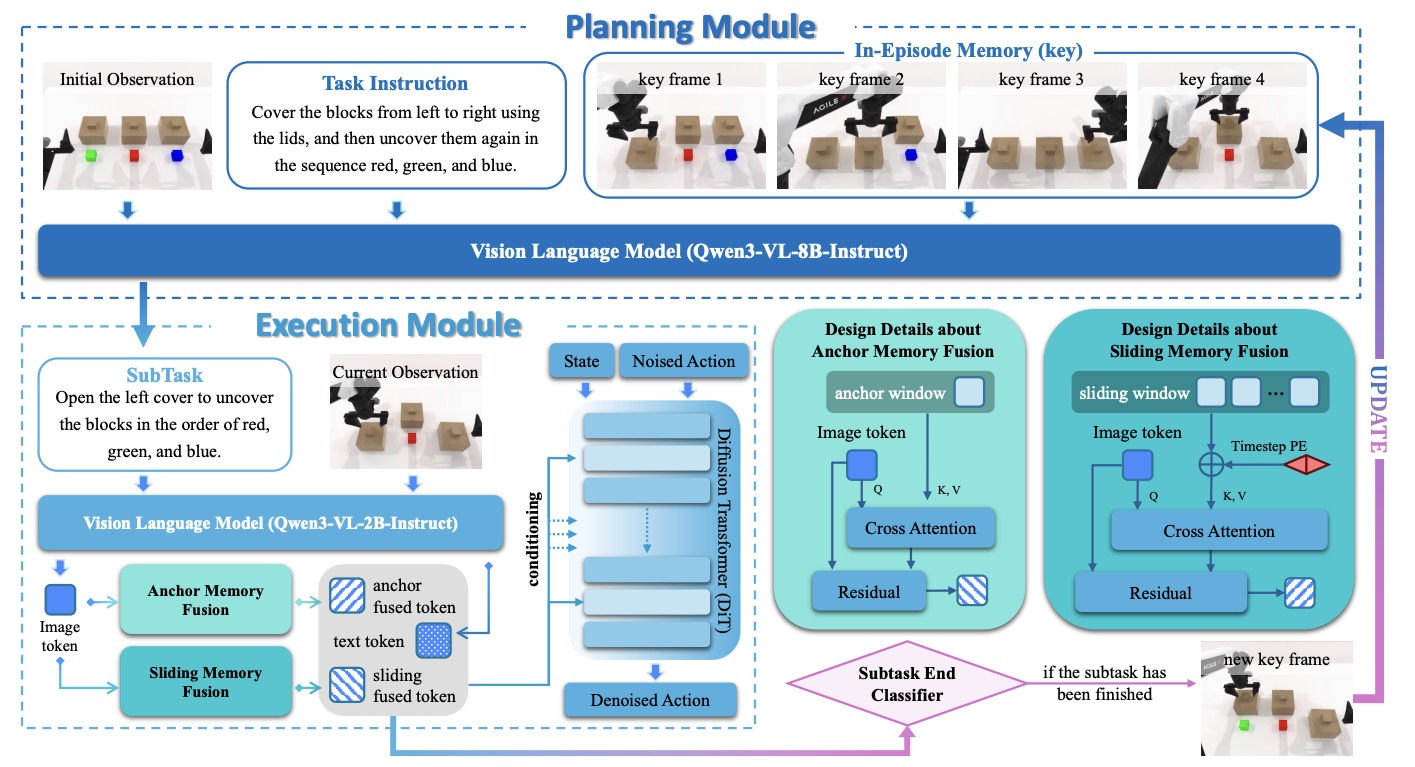 RMBench: Memory-Dependent Robotic Manipulation Benchmark with Insights into Policy DesignUnder Review
RMBench: Memory-Dependent Robotic Manipulation Benchmark with Insights into Policy DesignUnder Review -
UniVTAC: A Unified Simulation Platform for Visuo-Tactile Manipulation Data Generation, Learning, and BenchmarkingUnder Review🏆 IEEE ICRA 2026 ViTac Workshop Best Paper Award
-
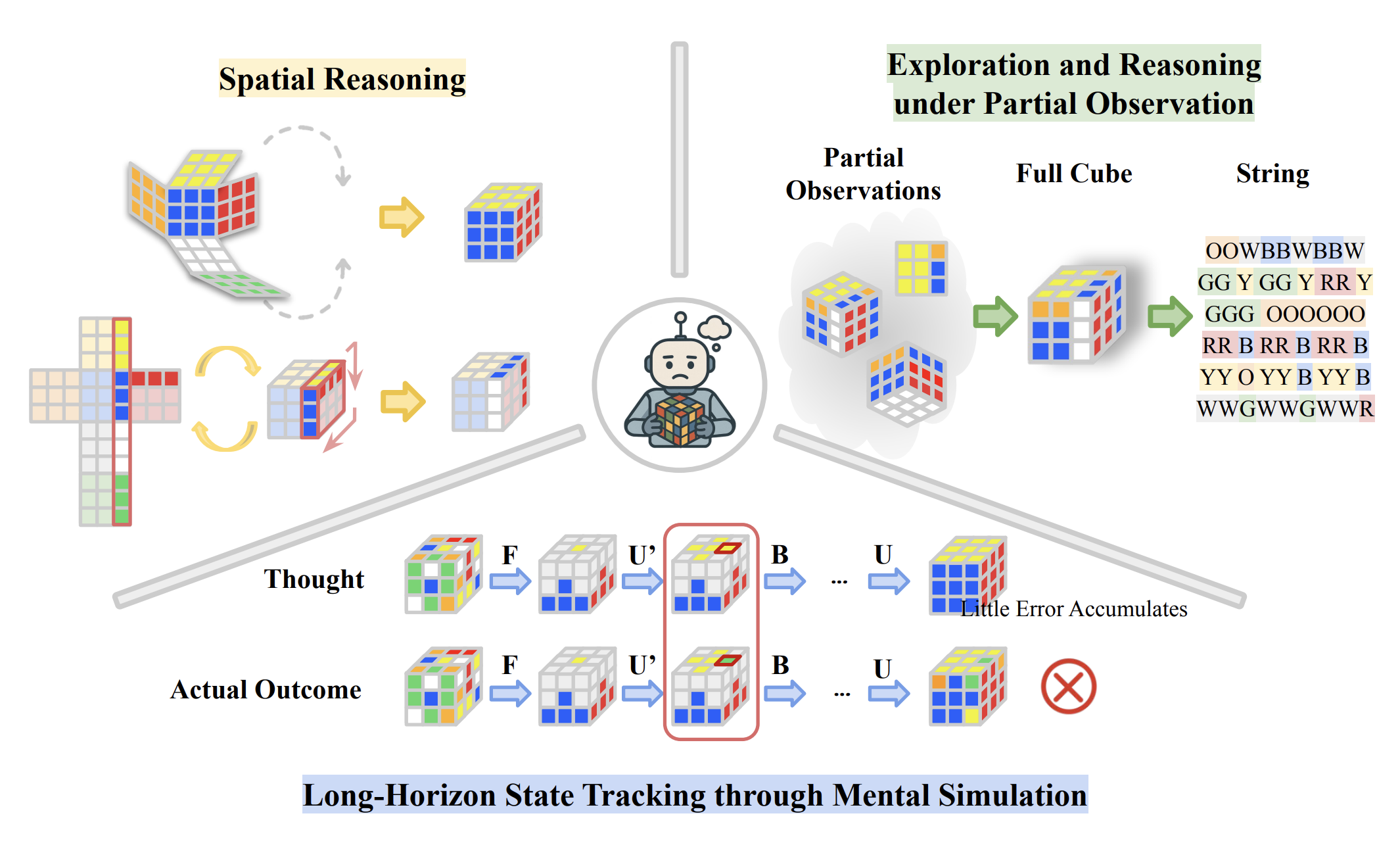 CubeBench: Diagnosing Interactive, Long-Horizon Spatial Reasoning Under Partial ObservationsICLR 2026
CubeBench: Diagnosing Interactive, Long-Horizon Spatial Reasoning Under Partial ObservationsICLR 2026 -
 Advances and Innovations in the Multi-Agent Robotic System (MARS) Challenge — Contributed Champion Solution of Manipulation TrackTechnical Report of the NeurIPS 2025 MARS Challenge at the SpaVLE Workshop🏆 Champion — NeurIPS 2025 MARS Challenge Manipulation Track
Advances and Innovations in the Multi-Agent Robotic System (MARS) Challenge — Contributed Champion Solution of Manipulation TrackTechnical Report of the NeurIPS 2025 MARS Challenge at the SpaVLE Workshop🏆 Champion — NeurIPS 2025 MARS Challenge Manipulation Track -
FieldGen: From Teleoperated Pre-Manipulation Trajectories to Field-Guided Data GenerationUnder Review
-
-
RoboTwin 2.0: A Scalable Data Generator and Benchmark with Strong Domain Randomization for Robust Bimanual Robotic ManipulationICML 2026🏆 ModelScope Top 10 Open-Source Project of 2025; 🏆 IROS 2025 RoboGen Workshop Best Paper Finalist; 🏆 RoDGE Workshop Best Poster Award
-
 Benchmarking Generalizable Bimanual Manipulation: RoboTwin Dual-Arm Collaboration Challenge at CVPR 2025 MEIS WorkshopTechnical Report of the CVPR 2025 RoboTwin Challenge at the MEIS Workshop
Benchmarking Generalizable Bimanual Manipulation: RoboTwin Dual-Arm Collaboration Challenge at CVPR 2025 MEIS WorkshopTechnical Report of the CVPR 2025 RoboTwin Challenge at the MEIS Workshop -
-
-
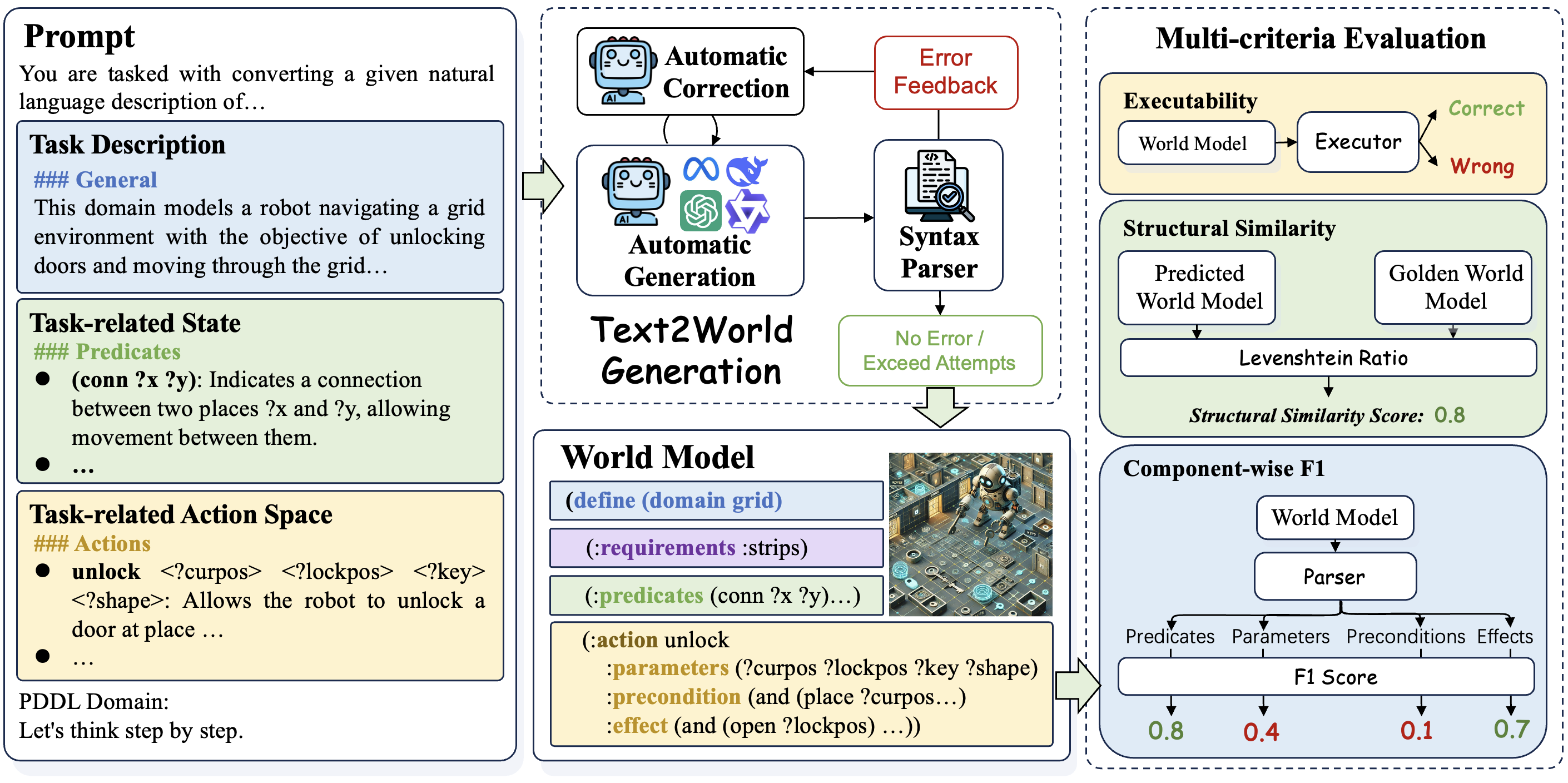 Text2World: Benchmarking Large Language Models for Symbolic World Model GenerationACL 2025 (findings)
Text2World: Benchmarking Large Language Models for Symbolic World Model GenerationACL 2025 (findings) -
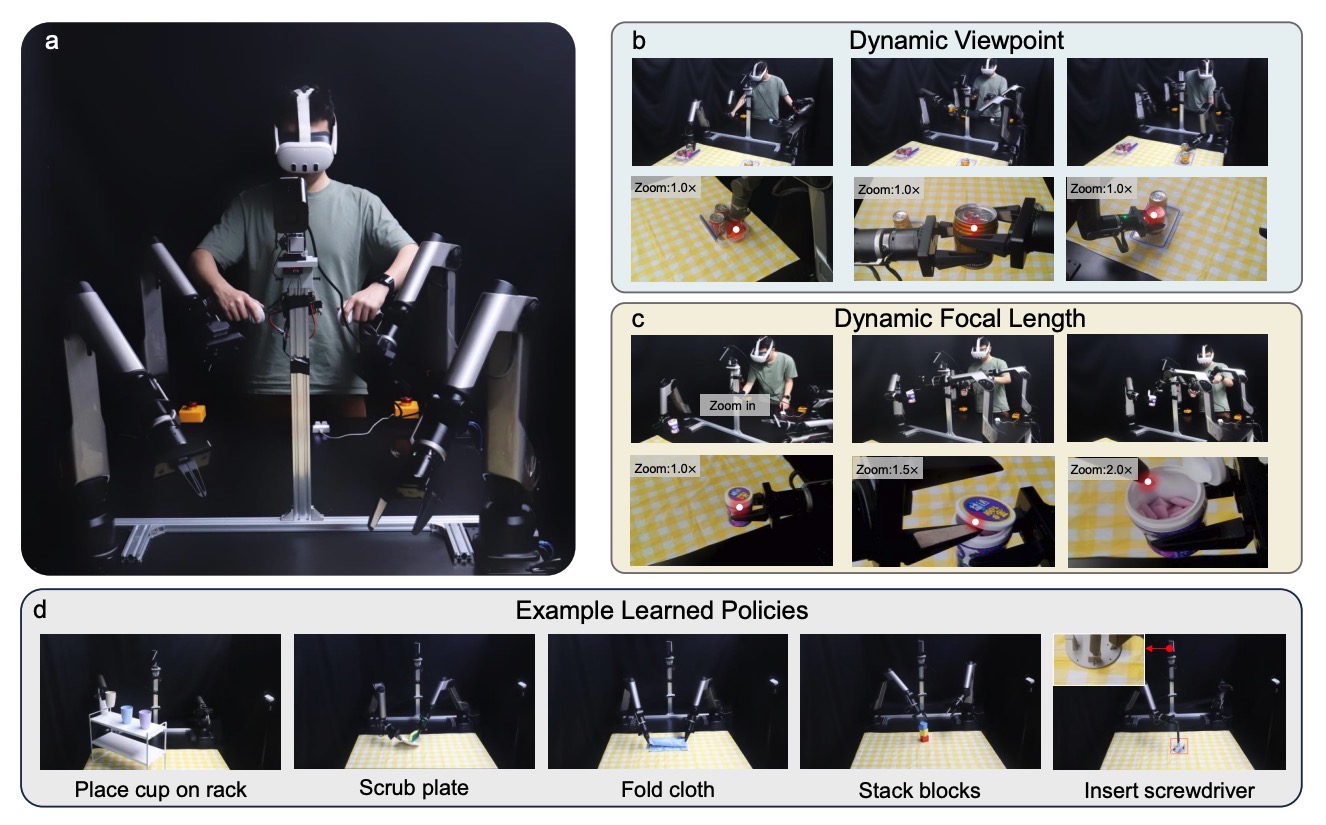
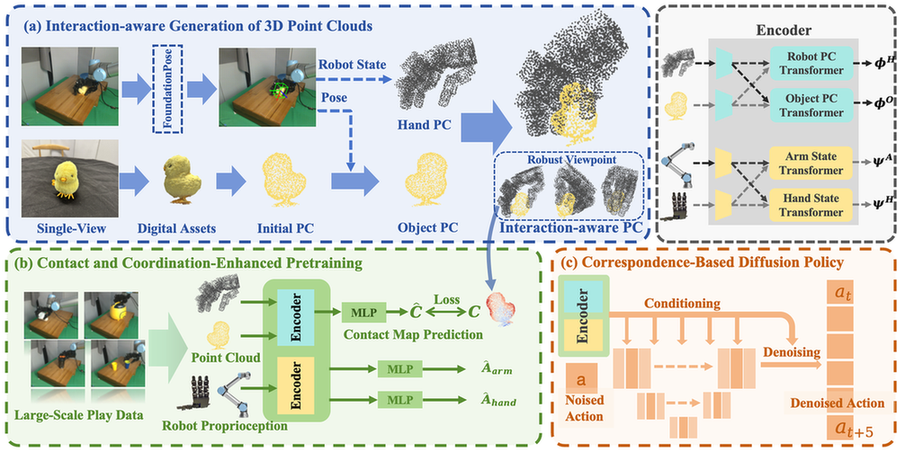 CordViP: Correspondence-based Visuomotor Policy for Dexterous Manipulation in Real-WorldRSS 2025
CordViP: Correspondence-based Visuomotor Policy for Dexterous Manipulation in Real-WorldRSS 2025 -
 G3Flow: Generative 3D Semantic Flow for Pose-aware and Generalizable Object ManipulationCVPR 2025
G3Flow: Generative 3D Semantic Flow for Pose-aware and Generalizable Object ManipulationCVPR 2025 -
 RoboTwin: Dual-Arm Robot Benchmark with Generative Digital TwinsCVPR 2025 (Highlight, top 13.5%)🏆 ECCV 2024 MAAS Workshop Best Paper Award
RoboTwin: Dual-Arm Robot Benchmark with Generative Digital TwinsCVPR 2025 (Highlight, top 13.5%)🏆 ECCV 2024 MAAS Workshop Best Paper Award -
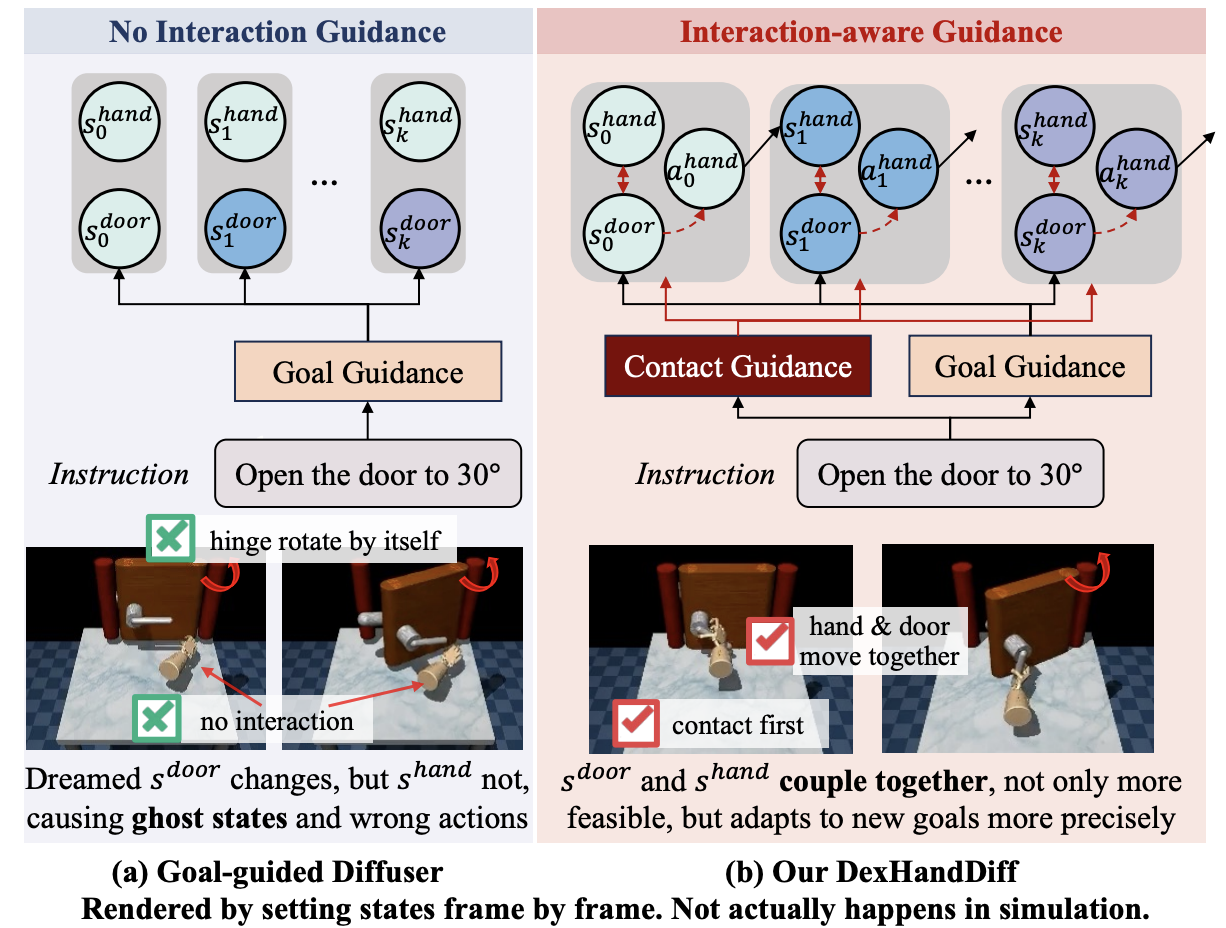 DexHandDiff: Interaction-aware Diffusion Planning for Adaptive Dexterous ManipulationCVPR 2025
DexHandDiff: Interaction-aware Diffusion Planning for Adaptive Dexterous ManipulationCVPR 2025 -
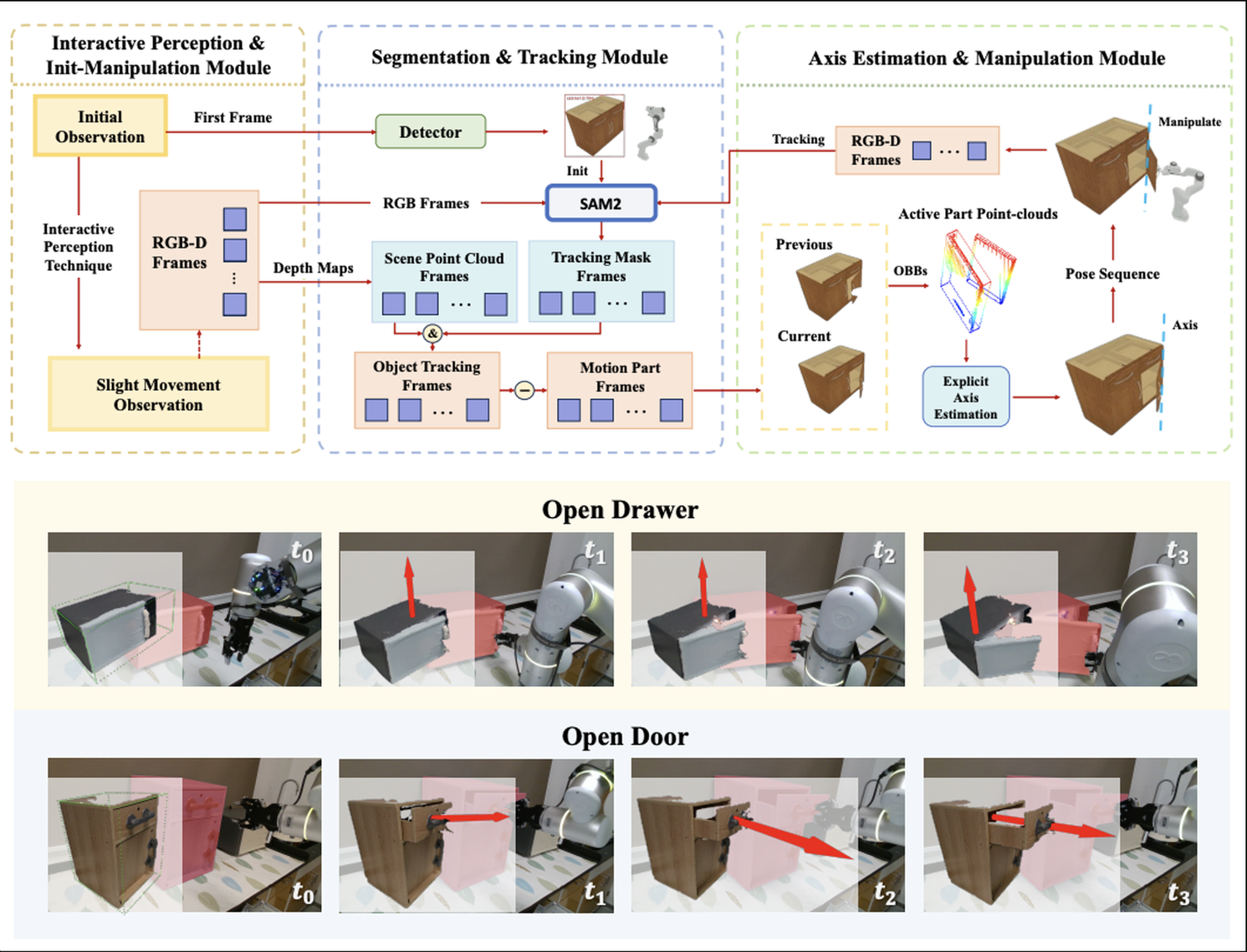 Articulated Object Manipulation using Online Axis Estimation with SAM2-Based TrackingCoRL 2025 RINO Workshop
Articulated Object Manipulation using Online Axis Estimation with SAM2-Based TrackingCoRL 2025 RINO Workshop -
-
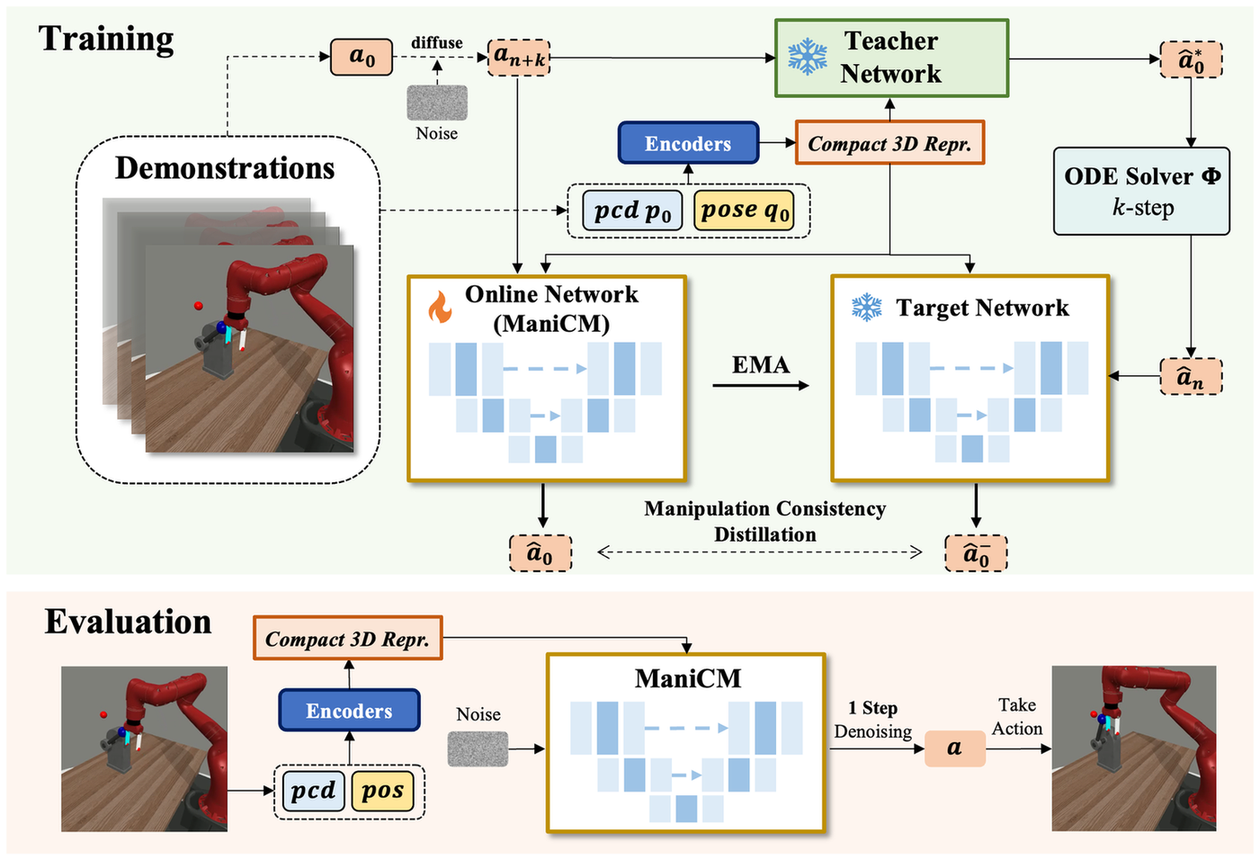 ManiCM: Real-time 3D Diffusion Policy via Consistency Model for Robotic ManipulationIEEE RCAR 2026
ManiCM: Real-time 3D Diffusion Policy via Consistency Model for Robotic ManipulationIEEE RCAR 2026 -
* Equal contribution. † Corresponding author. Full list on Google Scholar →
Honors & Academic Awards



- 2025D-Robotics Developer Star 2025
- 2024Excellent Star of SZU (Nominated), the highest honor for undergraduate students at Shenzhen University, CNY 30,000
- 2024Liyuan Star Scholarship, the highest honor for college-level undergraduates, CNY 20,000
- 2024First Prize of Scholarship for Top Innovative Talents, ranked first in the selection, CNY 12,000
- 2023First Prize of Innovation & Entrepreneurship Star (Individual), CNY 3,000
- 2024First Prize of Innovation & Entrepreneurship Star (Team), CNY 3,000
- 2024Second Prize for Outstanding Student Leaders, CNY 2,000
- 2022Second Prize of Study Star, CNY 2,000
- 2023Liyuan Star Scholarship, the highest honor for college-level undergraduates, CNY 20,000
- 2023Pengcheng Scholarship, 71 students selected from 30,000 undergraduate students, CNY 10,000
- 2023Outstanding Student Leader of Shenzhen University
- 2023First Prize of Scholarship for Top Innovative Talents, ranked first in the selection, CNY 12,000
- 2023First Prize for Outstanding Student Leaders, the only class leader among the first prize, CNY 3,000
- 2023First Prize of Innovation & Entrepreneurship Star (Individual), CNY 3,000
- 2023Second Prize of Charity Star, CNY 2,000
- 2023Second Prize of Study Star, CNY 2,000
- 2023First Prize of Innovation & Entrepreneurship Star (Team), CNY 3,000
- 2023Third Prize of Cultural and Sports Star (Team), CNY 2,000
- 2023Advanced Class Collective, ranked first in grade (served as monitor), CNY 1,000
- 2022Liyuan Star Scholarship, the highest honor for college-level undergraduates, CNY 20,000
- 2022First Prize of Scholarship for Top Innovative Talents, ranked first in the selection, CNY 12,000
- 2022First Prize of Innovation & Entrepreneurship Star (Individual), CNY 3,000
- 2022Second Prize of Study Star, CNY 2,000
- 2022Advanced Class Collective, ranked first in grade (served as monitor), CNY 1,000
- 2021Full Tuition Scholarship for Top Innovative Talents, CNY 6,000
Programming Competition Awards
-
 (ACM-ICPC) International Collegiate Programming Contest Regional ContestSilver Medal 🥈With Yuanjie He, Yifei Liu. Supervised by Prof. Jianbin Qin. Team: SZU_Tencent
(ACM-ICPC) International Collegiate Programming Contest Regional ContestSilver Medal 🥈With Yuanjie He, Yifei Liu. Supervised by Prof. Jianbin Qin. Team: SZU_Tencent -
 RoboCom Robot Development Competition (RAICOM)National Runner-up 🏆With Weili Li, Jiaxuan Li. Supervised by Dr. Jie Chen. Team: Shenzhen University
RoboCom Robot Development Competition (RAICOM)National Runner-up 🏆With Weili Li, Jiaxuan Li. Supervised by Dr. Jie Chen. Team: Shenzhen University
- 2024National gold medal team & Provincial runner-up 🏆, (CCCC) China Collegiate Computing Contest
- 2023Silver Medal 🥈, (ACM-ICPC) International Collegiate Programming Contest Regional Contest (46th)
- 2023National Runner-up 🏆, RoboCom Robot Development Competition (RAICOM)
- 2023Gold Medal, (GDCPC) China Collegiate Programming Contest Guangdong Provincial Contest
- 2023Silver Medal, (CCPC) China Collegiate Programming Contest National Invitational Contest
- 2023National First Prize, top 0.3%, LanQiao Cup Programming Contest (C/C++)
- 2022Provincial Second Prize, Wechat Mini Programs Application Development Contest
Open-source Projects
-
 Founder & Project Lead & First Author · Over
Founder & Project Lead & First Author · OverGithub Stars 🔥
The most popular Embodied AI tutorial in China. -
 An automated paper tracking and summarization tool for Embodied AI researchers.
An automated paper tracking and summarization tool for Embodied AI researchers.
Academic Services
-
2026
 ECCV 2026 Safe World Models for Trustworthy Embodied AIOrganizer and Challenge Chair [Website]This workshop centers on world models — learned dynamical representations that enable structured latent simulation of future visual and physical states.
ECCV 2026 Safe World Models for Trustworthy Embodied AIOrganizer and Challenge Chair [Website]This workshop centers on world models — learned dynamical representations that enable structured latent simulation of future visual and physical states. -
2026

-
2026
 IEEE ICRA 2026 WBCD (What Bimanuals Can Do) ChallengeOrganizer and Sponsor [Website]The WBCD Competition challenges teams to solve real-world manipulation tasks that represent actual industry needs with billion-dollar market potential. Unlike typical research benchmarks, our tasks are carefully designed by leading robotics companies to address genuine commercial applications in logistics, life sciences, and manufacturing.
IEEE ICRA 2026 WBCD (What Bimanuals Can Do) ChallengeOrganizer and Sponsor [Website]The WBCD Competition challenges teams to solve real-world manipulation tasks that represent actual industry needs with billion-dollar market potential. Unlike typical research benchmarks, our tasks are carefully designed by leading robotics companies to address genuine commercial applications in logistics, life sciences, and manufacturing. -
2025
 SIGGRAPH ASIA 2025 TriFusion WorkshopOrganizer [Website]TriFusion: Towards Embodied Intelligence Across Humans, Avatars, and Humanoid Robotics aims to catalyze interdisciplinary dialogue and innovation at the intersection of computer graphics, artificial intelligence, robotics, and cognitive science.
SIGGRAPH ASIA 2025 TriFusion WorkshopOrganizer [Website]TriFusion: Towards Embodied Intelligence Across Humans, Avatars, and Humanoid Robotics aims to catalyze interdisciplinary dialogue and innovation at the intersection of computer graphics, artificial intelligence, robotics, and cognitive science. -
2025
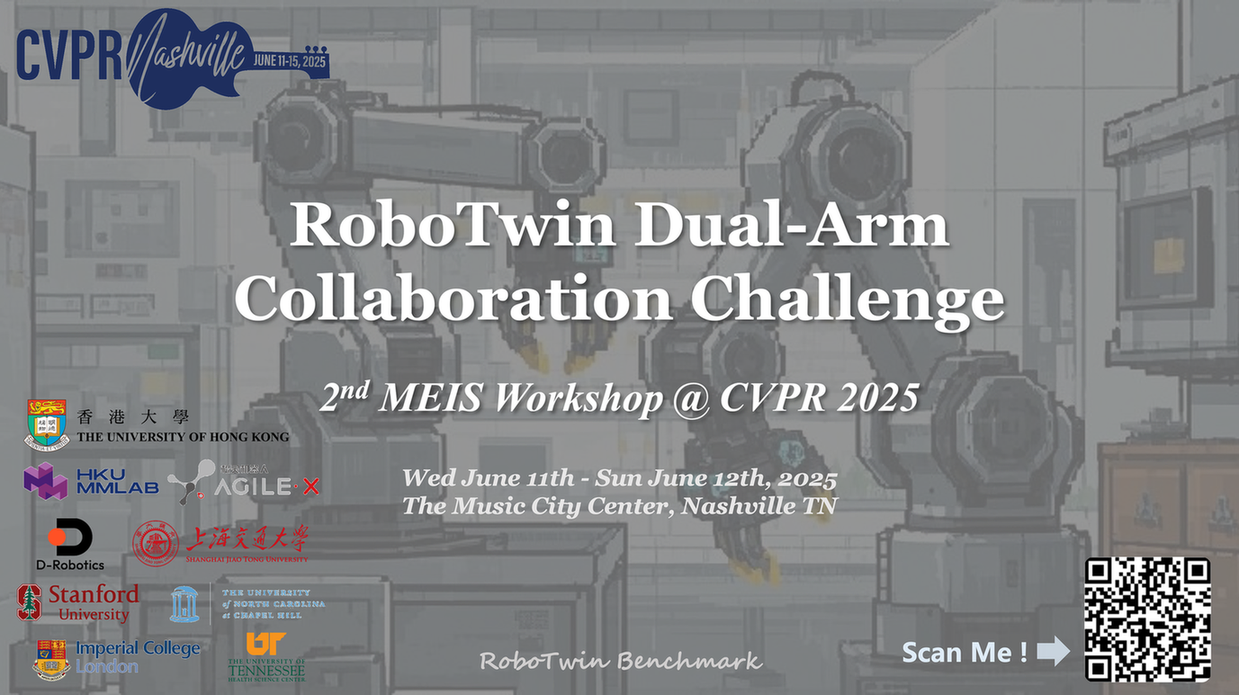
 CVPR 2025 MEIS Workshop & RoboTwin Dual-Arm Collaboration ChallengeOrganizer and Technical Leader [Website]The CVPR 2025 MEIS Challenge explores Embodied AI via dual-arm manipulation on RoboTwin, AgileX Cobot-Magic, with Rigid Object and Tactile tracks powered by multi-agent AI methods.
CVPR 2025 MEIS Workshop & RoboTwin Dual-Arm Collaboration ChallengeOrganizer and Technical Leader [Website]The CVPR 2025 MEIS Challenge explores Embodied AI via dual-arm manipulation on RoboTwin, AgileX Cobot-Magic, with Rigid Object and Tactile tracks powered by multi-agent AI methods.
- Reviewer ICML 2026 (Gold Reviewer), ECCV 2026, IROS 2026, ICRA 2026, ICRA 2025, ICLR 2025 World Models Workshop, CoRL 2025 RINO Workshop
- Challenge IEEE ICRA 2026 WBCD Challenge, CVPR 2025 RoboTwin Dual-Arm Collaboration Challenge, The 19-th Challenge Cup "AI+" Special Track, Zhangjiang Humanoid Robot RoboTwin Bimanual Collaboration Simulation Competition
- Workshop ECCV 2026 Safe World Model Workshop, EAI-100 2025, SIGGRAPH Asia 2025 TriFusion Workshop, CVPR 2025 2nd MEIS Workshop, The Greater Bay Area Embodied AI Workshop 2025, CICC-Lumina Innovation Camp on Humanoid Robots
Invited Talks
- 10/2025 IROS 2025 RoboGen Workshop (Oral Presentation), shared RoboTwin 2.0
- 10/2025 ARTS (Autonomous Robotic Technology Seminar), shared RoboTwin 2.0
- 10/2025 模速空间, shared RoboTwin 2.0
- 09/2025 DexForce Technology, shared RoboTwin 2.0
- 08/2025 BAAI Hub, shared RoboTwin 2.0 [Video]
- 07/2025 具身智能之心, shared RoboTwin 2.0 [Video]
- 12/2024 3DVer, shared RoboTwin [Video]
- 12/2024 RLChina, shared RoboTwin [Video]